About Me
I am a Robotics Graduate Student at the University of Minnesota, specializing in Robot Perception and Manipulation. I am advised by Professor Karthik Desingh in the Robotics: Perception, and Manipulation (RPM) Lab. My current research focuses on imitation learning for bimanual robots.
Prior to pursuing masters, I worked at Nuclear Power Corporation of India Limited, contributing to the design of a spent fuel handling machine—a large-scale manipulator used for handling fuel assemblies in a spend fuel storage facility.
My interest lies in developing intelligent robots to address critical industrial challenges. With a strong foundation in math and physics, coupled with a keen interest in adopting new technologies, I am eager to contribute to industries by creating artificial intelligence for enhancing the capabilities of robots.
- Robot Perception/Manipulation
- Computer Vision
- Autonomous vehicles
University of Minnesota, 2025 (expected)
Master of Science in Robotics
Indian Institute of Technology Varanasi, 2018
Bachelor of Technology in Mechanical Engineering
Technical Languages & Frameworks











Experience
- Designed module for tracking and grasping dynamic objects while avoiding collisions on a dual UR5e arm setup. Utilized ArUco markers for object localization and vector-accelerated motion planning for motion generation. (GitHub) | (YouTube)
- Implemented collision avoidance module for dual UR5e arms teleoperation system, reducing emergency stop occurrence by 93.1%. (YouTube)
- Developed segmentation-guided grasp generation module utilizing Segment Anything Model (SAM) and Contact-GraspNet for easily generating 6-DOF grasp pose over the desired object part. (GitHub) (YouTube)
- Developed and maintain wrapper for Intel RealSense LiDAR and Stereo cameras in the lab, used by 4+ people.
- Developing assignment to introduce students to the Robot Operating System (ROS) and state estimation using a real robot.
- Assisting 60+ students with assignments involving robotics concepts, including 3D transformations, robot kinematics, path planning, motion control, and finite state machines.
- Tutoring class of 45+ students in writing Python code to implement financial and statistical data analysis concepts, such as portfolio optimization, Monte Carlo simulation, and trading strategy backtesting.
- Held regular office hours for 30+ hours to assist students in utilizing Pandas, NumPy, scikit-learn, and Matplotlib for data analysis.
- Organized discussion sessions in a lecture-style format to offer solutions for quiz problems to a class of 35+ students.
- Assisted students with MATLAB code for implementing concepts related to vectors, tensors, kinematics, as well as Euler and Lagrangian approaches to particle and rigid body dynamics.
- Developed 106 technical drawings and 18 calculation documents, leading the design of a fuel transfer machine.
- Prepared 12 technical specifications and reviewed 6 quality plans for material handling equipment, ensuring compliance with ASTM standards.
- Assisted in creation of an Excel dashboard for consolidating data, which achieved 100% adoption in the office.
- Managed a team of 8 salespeople, achieving a 31% increase in customer engagement over 6 months.
Projects
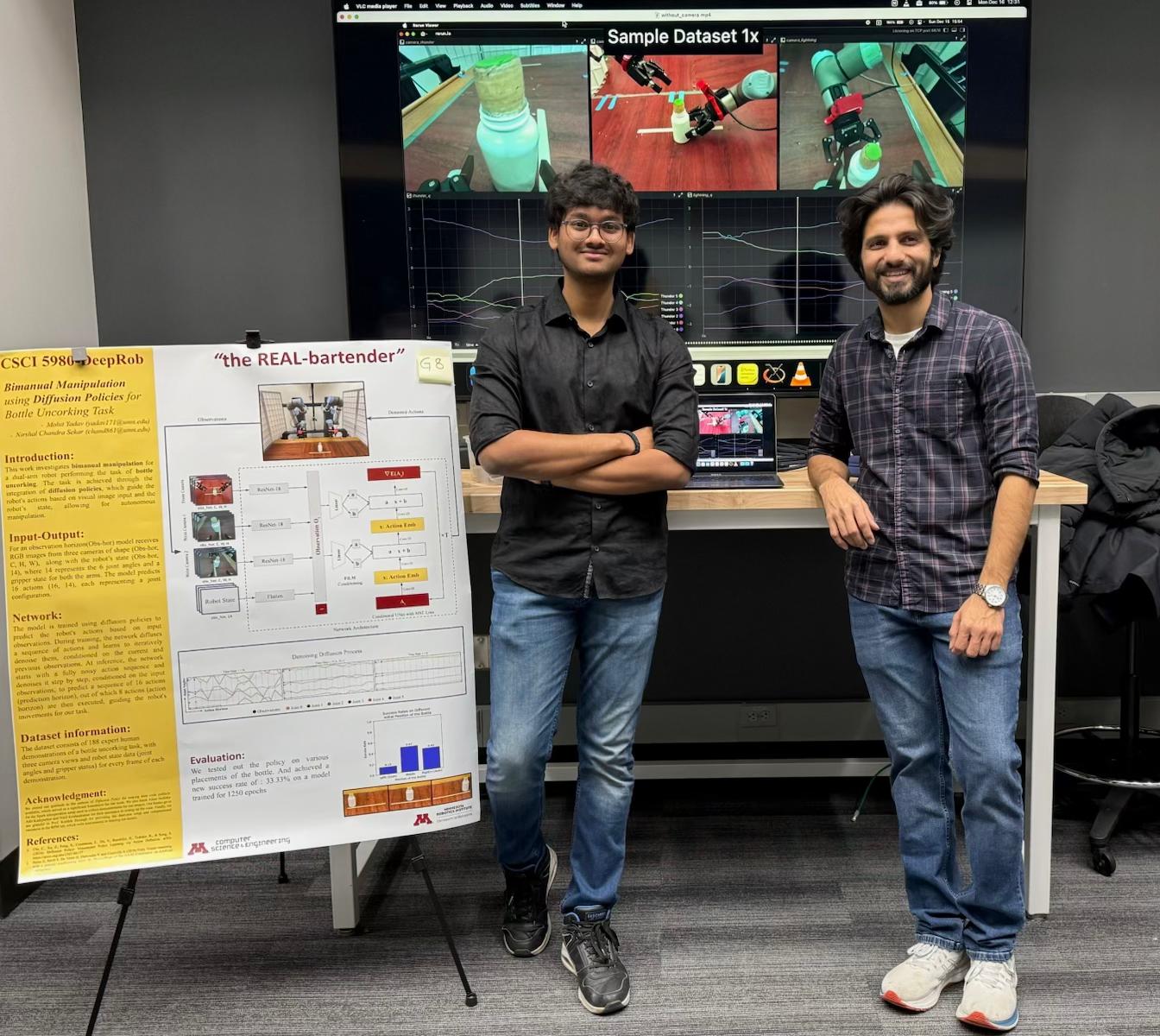
Bimanual manipulation using Diffusion Policy 🔗
- Implemented and trained a diffusion policy for bottle uncorking task using a dual UR5e arm setup.
- Utilized ROS for data collection and PyTorch for model implementation.
- Achieved an average task completion rate of 74.7% across 30 rollouts.
Collision Avoidance for Dual UR5e Arms Setup 🔗
- Developed a collision avoidance module for the teleoperation system of dual UR5e robot arms.
- Utilized Vector-Accelerated Motion Planning to perform collision checks at 1000 Hz using data from the robot's proprioception.
- Reduced the number of emergency stops due to collisions by 95% for new users.
Scene Description for the Visually Impaired 🔗
- Designed a navigation system to assist visually impaired users.
- Utilized YOLO for object detection, LiDAR for depth input, and an LLM to provide coherent language instructions.
- Achieved an 81.4% net preference score over baseline VLM.
Self Driving Vehicle Lateral and Longitudinal Control 🔗
- Implemented self-driving vehicle control in CARLA simulator to control a vehicle given waypoints.
- Implemented PID controls for longitudinal control; and Pure Pursuit & Stanley controls for lateral control.
- Developed sensor fusion with ES-EKF for state estimation, integrating IMU, GNSS, and LiDAR data.
Grasping of Dynamic Object under Dynamic Scenarios 🔗
- Designed a grasping pipeline for dynamic objects marked with ArUco tags, capable of handling occlusions and obstacles.
- Implemented the system on a dual UR5e arm setup, utilizing OpenCV for ArUco detection and VAMP for collision detection.
- Achieved smooth motion for grasping by incorporating a confidence-based movement metric.
Human Pose Imitation on Baxter Robot 🔗
- Developed a system to replicate real-time human actions captured via a camera on a simulated Baxter robot.
- Utilized MediaPipe for 3D keypoint extraction and designed an algorithm to map keypoints onto the robot.
- Built a live demo website, demonstrating consistent performance and adaptability to various human shapes and sizes.
Disassembly of Articulated Objects Using Dual Arm Robot 🔗
- Developed an object disassembly system for a dual UR5e arm setup in PyBullet with two teammates.
- Created a segmentation-guided grasping module for generating 6-DOF grasp poses using SAM and ContactGraspNet.
- Designed a deep learning model to classify disassembly operations from videos using features extracted with MediaPipe.
Human Hand Tracking and Pose Estimation 🔗
- Led a team of 4 graduate students to develop a hand tracking and pose estimation model with ResNet50 as backbone.
- Trained the model on the HaGRID dataset using a YOLO like loss function, achieving a mAP@50 of 0.68 on the test data.
- Created an interactive virtual board using OpenCV, enabling users to draw using hand gestures @8 fps.

Movie Recommendation System Using Graph Convolution Network 🔗
- Implemented a Graph Convolution Network (LightGCN) using PyTorch Geometric to develop a movie recommender system.
- Transformed the dataset into sparse tensors and applied Bayesian Personalized Ranking loss function for model optimization.
- Achieved a recall@20 of 0.12 on the MovieLens dataset during testing.

AI agent for Ultimate Tic-Tac-Toe 🔗
- Developed a human playable Ultimate Tic-Tac-Toe game in Python3, leveraging object-oriented programming principles.
- Implemented an AI agent capable of searching a state space of size 500k+ in <1sec using MiniMax algorithm with pruning.
- Designed custom heuristics for the AI, achieving a 70% win rate against online available AI opponents.

Web Crawler for Notifying Driving License Test Availability 🔗
- Developed a web crawler to monitor the Minnesota DVS website for test availability every 5 minutes.
- Employed Selenium to automate the input of user details and navigation of the webpage to check availability.
- Incorporated email notifications into the script to alert me when an appointment slot becomes available.
Certifications
Talks
Interview with a Prominent Indian Faculty Providing Tips for BARC Interview Preparation
Presentation on Diffusion Policy for Robot Manipulation
Hobbies & ExtraCurriculars